Company - GITAI
Product/Service - R1
- Classification
- Surface Spacecraft
- Category
- Commercial Rover
- Fields
- Lunar Rover
- Status
- Development
- First launch
- Not announced
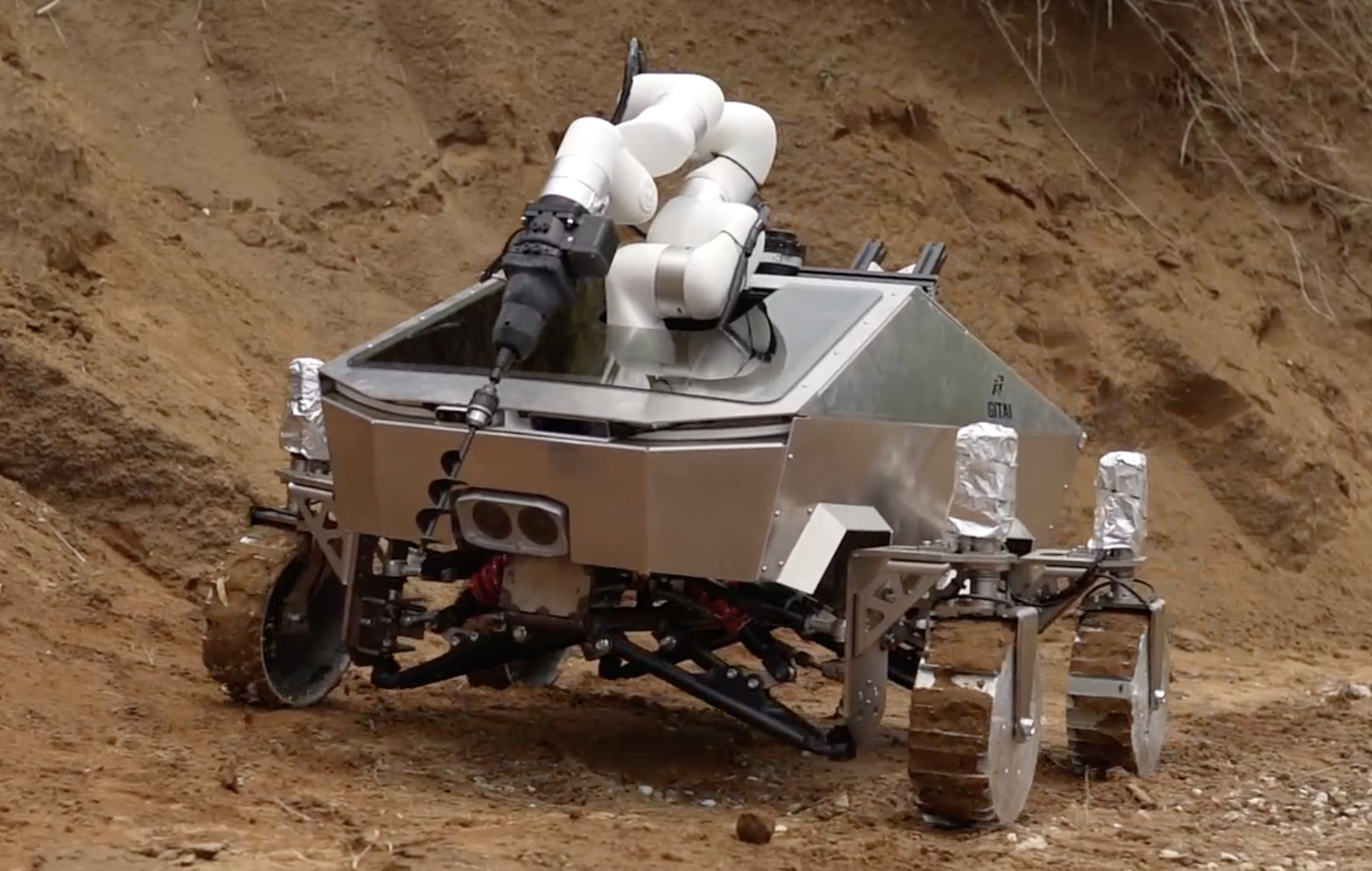
GITAI Lunar Rover (Rover / Space Permanence)
- Length: 1.5 [m] (Dual Arm)
- DOF: 8+1 for each arm
- Control: autonomous / teleoperation
Specifications (Rover) - Size: 1.6 x 1.4 x 1.9 (Highest) [m]
- Weight: 220 kg
- Wheel dimension: 0.4 x 0.15 [m]
Notes
- We changed our company name from "MacroSpace Inc." to "GITAI Inc." to be the same as product name.
- GITAI Founding Story, 2024-05-23.
- GITAI Raises an Additional US$15.5 Million in Funding, 2024-11-13.
- GITAI expanding satellite product line after successful demo, 2025-01-27.

Product/Service
- Classification
- In-Space Transportation
- Category
- On-Orbit Servicing
Space Tug
Orbital Transportation
- Fields
- On-Orbit Servicing
In-Space Satellite Servicing
- Status
- Development, Launched
- First launch
- 2024
CubeSat
GITAI SC 1 is an 16U (2×2×4U) CubeSat technology demonstration satellite built by GITAI to test a new spacecraft bus and instrument suite. SC1 will deploy a tethered target and then observe it with cameras, LiDAR, and a laser rangefinder, processing the data with visual recognition software.
Status Comment
A CubeSat launched in 2024. On-orbit servicing planned for 2026.
Created: 2025-01-06
Updated: 2025-09-06
Product/Service - S2
- Classification
- In-Space Manufacturing
- Category
- In-Space Assembly
Robotic Arm
Hardware
Space Robotics
- Fields
- Robot Astronaut
Space Construction Company
- Status
- Demonstrated, Launched
- First launch
- 2024
Movement of human to the low-earth orbit space station, and task on the site are subject to quite high cost as well as to safety issues. GITAI challenge to reduce the cost ten times lower by replacing humans with robots for movements to the low-earth orbit space station and tasks in the site.
Demo of GITAI's Lunar Robotic Rover R1 at JAXA’s Mock Lunar Surface Environment.
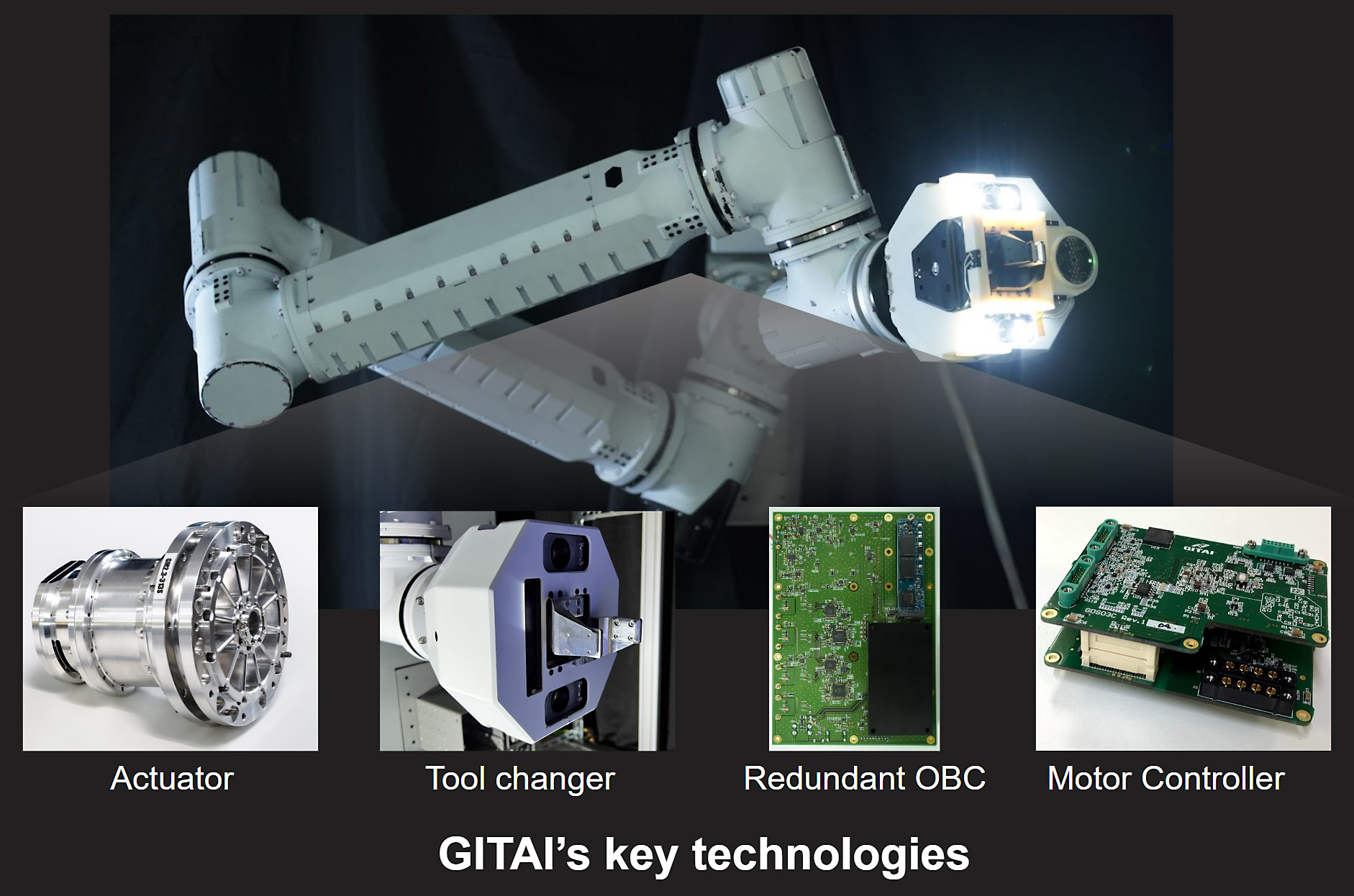
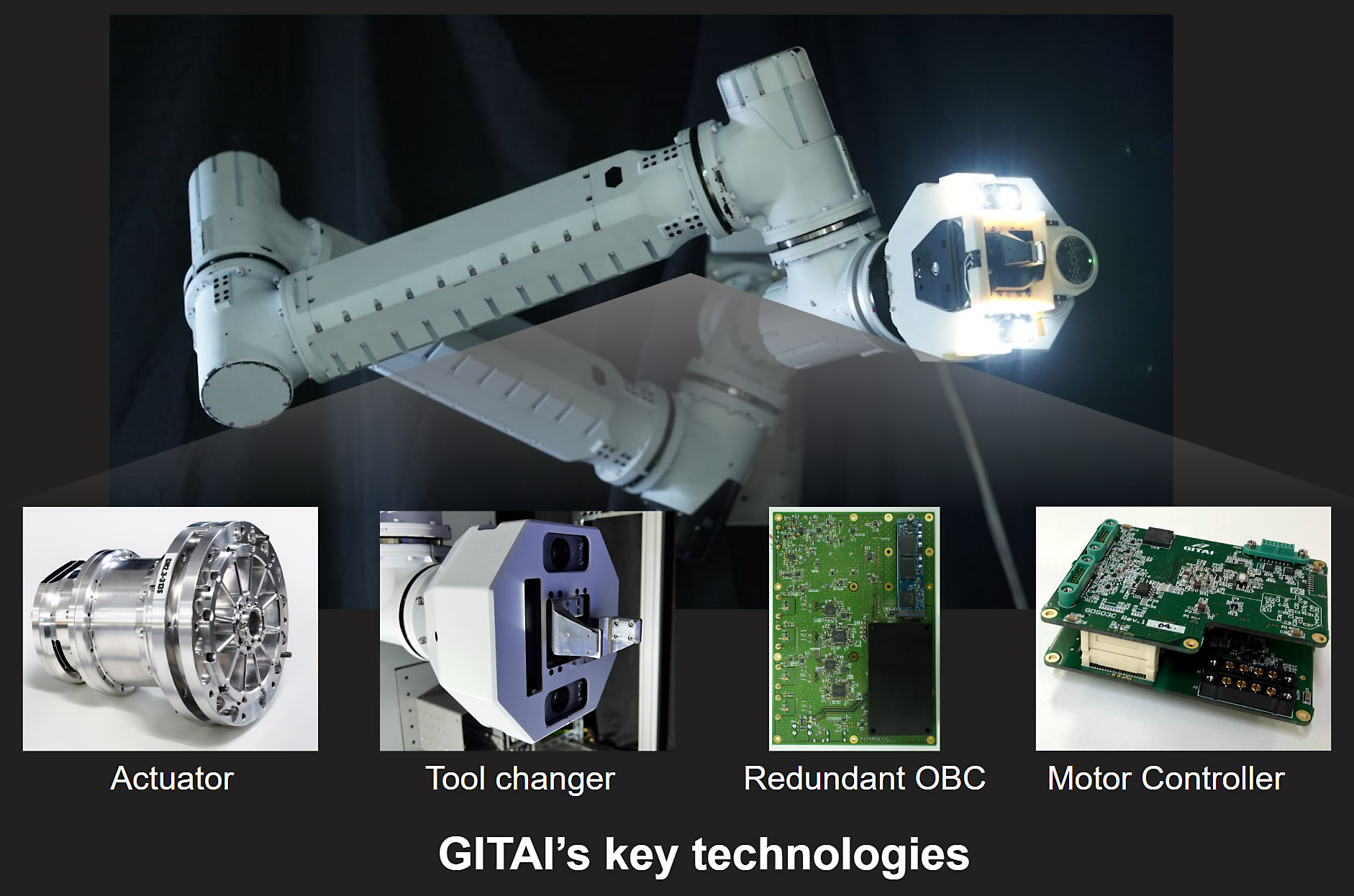
- Developed the GITAI IN1 (Inchworm One), an inchworm-type robotic arm equipped with “grapple end-effectors* ” on both ends of the arm.
- This unique feature increases “Capability”, which enables it to connect to various tools (end-effectors) to perform multiple tasks for various applications, and “Mobility”, which enables it to move in any direction. It can also connect/disconnect itself among different vehicles, such as rovers, landers, satellites, etc.
- In collaboration with the already announced GITAI R1 lunar rover, the GITAI IN1 has successfully completed various tests corresponding to Level 3 of NASA’s Technology Readiness Levels (TRL) in a simulated lunar environment at the JAXA Sagamihara Campus.
GITAI USA Secures DARPA LunA-10 Project
GITAI’s Robotics as a Service for Lunar Infrastructures, LSIC Spring Meeting, 2024-04-25.
Nanoracks – GITAI S2
Project GHOST: GITAI S2’s extraveHicular multi-Objective in-Space servicing Task demonstration.
- More than a dozen payloads representing diverse research areas will launch to the International Space Station (ISS) onboard Northrop Grumman’s 20th Commercial Resupply Services mission contracted by NASA. The launch is planned for no earlier than January 29, 2024.
- An investigation from space robotics startup GITAI Japan, Inc. will evaluate how efficiently its dexterous robotic arm technology operates outside of the space station. This project aims to demonstrate that GITAI’s extravehicular robotic systems are capable of functioning in the space environment. A pair of robotic arms will perform a series of common crew activities and tasks via supervised autonomy and teleoperations from the ground.
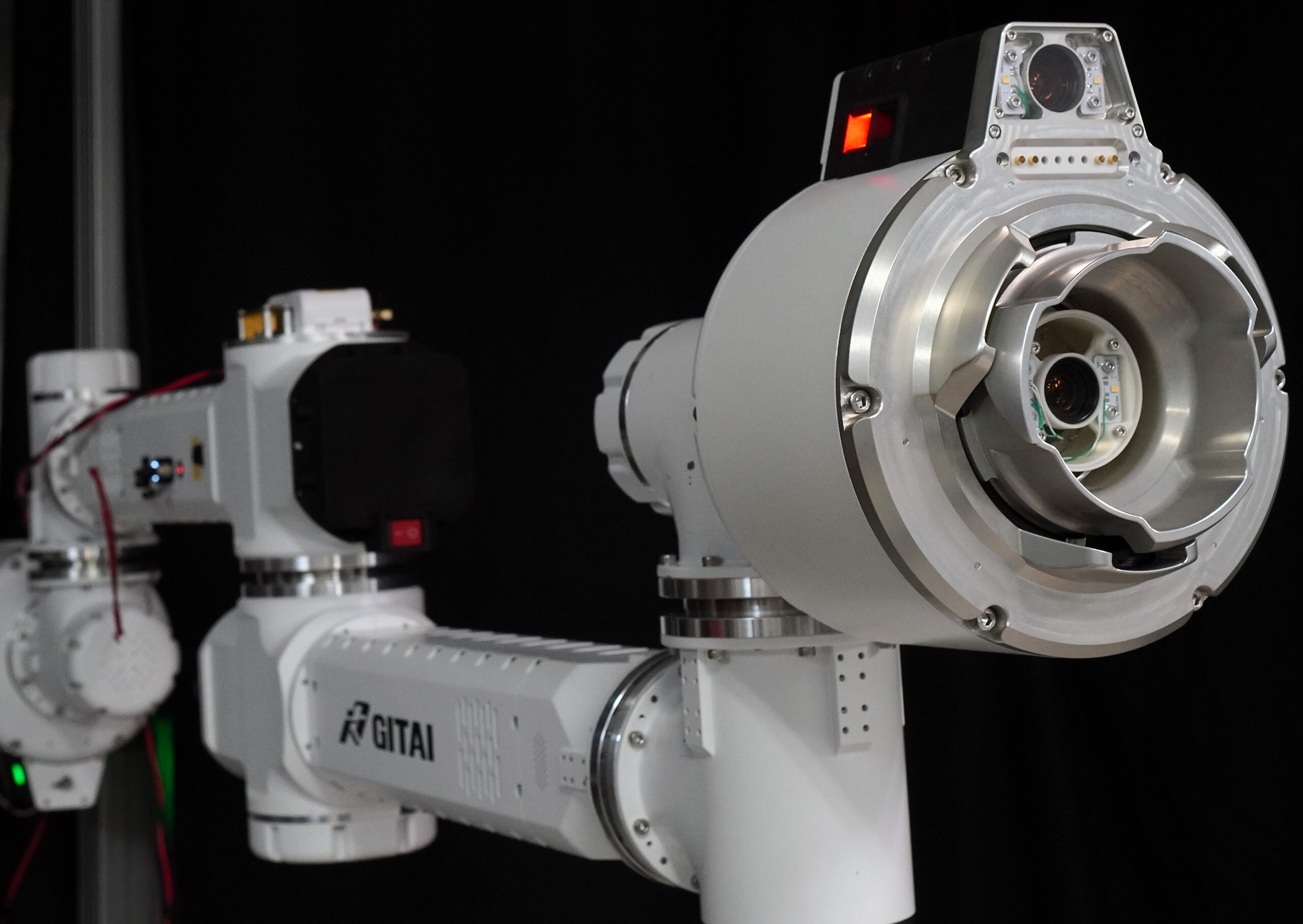
- GITAI S2: Project GHOST: GITAI S2’s “extraveHicular multi-Objective in-Space servicing Task” demonstration will showcase the company’s capability to design, build, integrate, and operate extravehicular robotic systems, specifically through the “S2” variant of GITAI’s 2-meter class Modular Robotic Arm. This investigation, conducted on an external experiment site of the Bishop Airlock, supports development of robots for in-space assembly and manufacturing operations, as well as potential applications in extreme environments on Earth, including disaster relief, deep-sea excavation, and servicing nuclear power plants. This is GITAI’s second mission with Voyager & the Bishop Airlock. Learn more about their previous robotic arm experimentation here.
GITAI to Launch a Pair of Robotic Arms to the ISS on Monday, Jack Kuhr, Payload, 2024-01-24.
- The 1.5-m long mechanical arms will be installed outside the station’s Bishop Airlock to demo capabilities such as mating connectors, changing out tools, and other maintenance operations tasks required for on-orbit servicing.
- A 1-m autonomous arm from GITAI has already been tested in space, assembling solar panels inside the ISS in 2021.
Autonomous Robotic Arm System Aims to Advance Space Station Robotics, 2024-02-21.
- California-based startup GITAI is gearing up to test a novel autonomous robotic arm system on the exterior of the International Space Station (ISS). Called S2, the 1.5-meter (4.9-foot) long pair of mechanical arms launched to the orbiting laboratory in January as part of an ISS National Laboratory®-sponsored technology development project on Northrop Grumman’s 20th Commercial Resupply Services (NG-20) mission.
- S2 is designed to carry out a variety of tasks, including in-space servicing, assembly, and manufacturing (ISAM) in the space environment. As part of a months-long series of demonstrations, the arms will be attached to the outside of the space station via a commercial airlock, which was designed and built by Nanoracks, part of Voyager Space’s Exploration Segment.
GITAI Inchworm Robot (Space-Proven GITAI Robotic Arms)
ISAM Services
Status Comment
Robotic arms launched to ISS in 2024.
Notes
Created: 2025-01-08
Updated: 2025-09-06
Similar Organizations
CubeRover, MoonRanger
Commercial Rover
![]()
Development
FLEX, FLIP, Mona Luna
Commercial Rover
![]()
Development
GALAGO
ISRU (In Situ Resource Utilization), Space Mining, Commercial Rover
![]()
Concept
Surveyorbot
Space Construction Company, Landing Pads, Commercial Rover
")
Development
Commercial Rover, Hardware

Development
CR3 Rover
Commercial Rover, Surface Habitats

Early stage
Rover, Transport Service (LEO-Moon), ISRU (In Situ Resource Utilization), Space Tug, In-Space Logistics
![]()
Concept
Jaguar 1
Commercial Rover, ISRU (In Situ Resource Utilization), In-Space Manufacturing

Dormant
ISRU (In Situ Resource Utilization), Commercial Rover
![]()
Cancelled, Development
SERIES-2 Lander
Transport Service (LEO-Moon), Commercial Rover, Commercial Lunar Lander
![]()
Development
YAOKI
Commercial Rover

Development, Launched
Commercial Rover, Space Mining
![]()
Cancelled
Consulting Service, Commercial Rover, Space Robotics
![]()
Active
Commercial Rover

Cancelled
Commercial Rover, ISRU (In Situ Resource Utilization), In-Space Manufacturing

Cancelled, Early stage
Autonomous Transport Platform (ATP)
Space Mining, Resources - Asteroid Mining, Commercial Rover
![]()
Cancelled, Development
Hemiunu, DRACO
Commercial Rover, Space Construction Company, Space Construction Equipment, Robotic Arm, Landing Pads
![]()
Development
Lunar Vehicle
Commercial Rover
![]()
Concept
Commercial Rover, Space Robotics, Software, Hardware, Robotic Arm, In-Space Assembly
![]()
Development
Gura Terra Space Rover
Commercial Rover

Concept
Commercial Rover
")
Development
Commercial Rover
![]()
Development
Rover
Commercial Rover

Development
Commercial Rover, Commercial Lander
![]()
Concept
Commercial Rover, Space Construction Company, Space Construction Equipment
![]()
Concept, Development
Dynetics Human Landing System
Commercial Rover
![]()
Development
Commercial Rover
![]()
Idea
Lunar Mobility Vehicle (LMV)
Commercial Rover
![]()
Concept
MAPP, HL-MAPP, Eagle
Commercial Rover, Surface Habitats, ISRU (In Situ Resource Utilization), Software & Mission Control

Development, Launched
Commercial Rover

Development
Canadaarm3, SKYMAKER
On-Orbit Servicing, Space Robotics, Commercial Rover, Resources - Energy, In-Space Assembly, In-Space Manufacturing, Robotic Arm
![]()
Development
Commercial Rover, Hardware
![]()
Concept
Space Entertainment, Commercial Rover

Dormant, ?
HiveR, CubeRover
Commercial Rover

Development
e-4ORCE
Commercial Rover
![]()
Concept
Commercial Rover

Concept
Surveyor, Excavator, Collector, Hauler, Dozer
Resources - Asteroid Mining, Commercial Rover, Space Mining

Development
M2 Lunar Rover
Commercial Rover
![]()
Development
Audi Quattro Lunar Rover
Commercial Lunar Lander, Commercial Rover
")
Dormant, Concept
Puli Lunar Rover
Commercial Rover, ISRU (In Situ Resource Utilization), Resources - Asteroid Mining
![]()
Development, Launched
Commercial Rover, Hardware, ISRU (In Situ Resource Utilization), Space Mining, Commercial Lander
")
Concept
Commercial Rover, Space Mining, Beyond-LEO Remote Sensing, Lunar Data Analytics
![]()
Cancelled, ?, Early stage
LUVMI, LUVMI-X
Commercial Rover
![]()
Development
LREV
Raw Resources, ISRU (In Situ Resource Utilization), Resources - Oxygen, Commercial Rover

Dormant
Resources - Oxygen, Commercial Rover, Raw Resources

Dormant
LEO
Commercial Rover
![]()
Early stage
Asagumo
Commercial Rover

Development, ?
SpaceHopper
Commercial Rover
![]()
Development, ?
Resources - Asteroid Mining, Space Mining, ISRU (In Situ Resource Utilization), Commercial Rover, Orbital Transportation
![]()
Early stage
MPR (Mobile Power Rover)
Commercial Rover, Power Beaming, Resources - Energy
![]()
Dormant, Concept
Commercial Rover
![]()
Cancelled
Commercial Rover
![]()
Development, ?
Lunar Terrain Vehicle (LTV)
Commercial Rover

Concept
Commercial Rover
![]()
Concept
LUNAR CRUISER
Commercial Rover

Development
Pylon
Resources - Energy, Nuclear Fission Power, Commercial Rover, Orbital Transportation
![]()
Cancelled
Luna-Crete, Constellation Vault
In-Space Manufacturing, Space Construction Company, Space Construction Equipment, Commercial Rover, Space Mining

Dormant
Space Mining, Resources - Asteroid Mining, Commercial Rover
![]()
Early stage
Lunar Autonomously Flying Robotic Systems, HopLa
Commercial Rover, Hopper, Drone, Moon Drone
![]()
Development
Luniaq
Commercial Rover, Consulting Service
![]()
Concept